本系统基于自研飞控为基础进行二次开发。实现无人机的基础飞行控制功能。飞行控制系统完成垂直起降固定翼的感知控制任务。通过采集无人机当前飞行状态,完成相应控制需要。飞行任务由“集群任务软件”下达控制指令,无人机根据相应指令完成飞行动作。飞行控制系统采用水平向瞄点控制,纵向总能量控制方式实现,通过给出无人机空速、航向、高度参数,实现无人机编队飞行。同时,飞机具备航线飞行模式等单机执行任务能力。
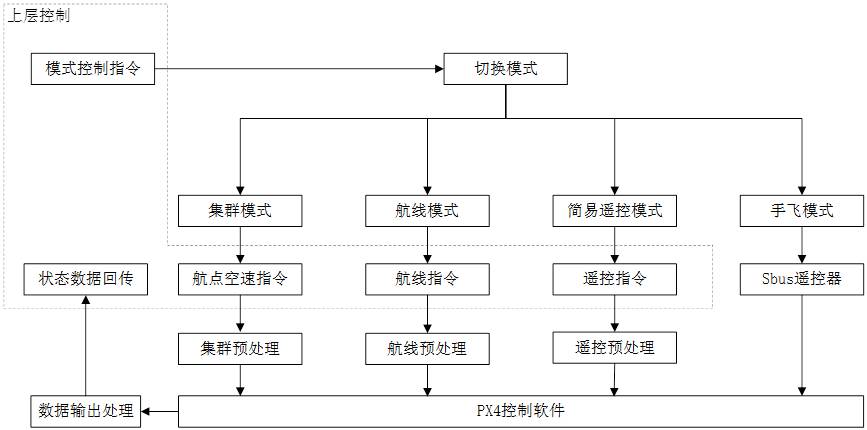
下图为任务的软件流程。根据上层的控制经过协议解析。收到模式切换指令,根据需求,目前有4个模式:集群模式、航线模式、简易操作模式、手飞模式。其中手飞模式为自研飞控基本模式,在处理中仅需要做模式号的映射。航线模式在原有自研飞控基础上进行修改实现m条航线n个航点,通过自研飞控原有L1和TECS方式实现航线飞行。简易遥控模式通过遥控指令,经过预处理对应修改自研飞控内部参数实现。集群模式,连续接收航点、空速指令。通过预处理的到目标航向、高度、空速。根据航向误差通过比例控制进一步得到目标滚转后发送至自研飞控。纵向控制采用自研飞控自带的TECS控制方法。
主要性能参数如下所示:
1) 定位方式:RTK室外定位系统
2) 单机定位精度:厘米级;
3) 最大集群组网数量:20个以上(根据场地情况而定);
4) 集群组网方式:低功率wifi自组网链路为主,1000*1000*100米以内;
5) 远距离大功率自组网链路:10*10*0.3km以内;
6) 场地要求:室外GPS信号有效覆盖场地;
7) 智能体平台:固定翼、垂直起降无人机(FVTOL-2100/FVTOL-2400);
8) 编队飞行时间:大于30min;
多智能体集群平台之室外RTK/GPS定位系统下垂直固定翼集群编队系统