硬件环境
1)珞石XB7机器人:最大工作半径707mm;重复定位精度0.02mm;手腕负载:7kg
2)机器人控制器:支持EtherCAT,tcp/ip, udp通信;同时支持多种串联及并联机器人控制,包括珞石,傲博,ABB等。
3)机器人软件开发工具:支持MATLAB/Simulink快速原型开发模式,提供机器人模型库和算法案例。
4)机器人仿真软件包:提供机器人仿真测试环境。
5)多维力传感器:测量维度6;量程0~10kg;灵敏度<1.5mV/V
6)手眼视觉系统:主动红外立体声;最小深度距离 0.1m;深度视场85.2°*58°*94°(+/-3°)
软件环境
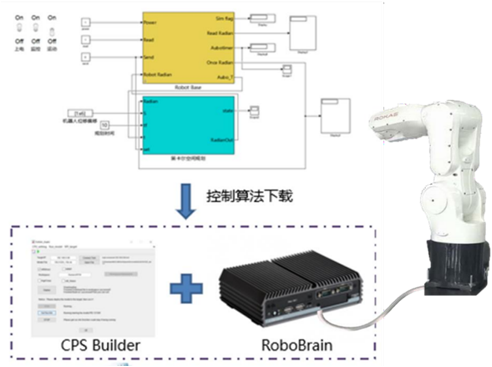
软件系统概述:
本实验台控制系统以机器人应用开发工具(CPS Builder)为核心软件单元。实现机器人控制系统的模型搭建,快速仿真测试。
基本开发流程如下:
1.数字仿真。在 Simulink 中建立关节控制模型,初步验证模型及算法;
2.半实物模型准备。对数字仿真模型进行修改,建立半实物仿真模型;
3.目标代码自动生成。将 Simulink 模型转化为C 代码,并最终编译为可执行程序;
4.仿真配置管理。配置仿真目标机属性;
5.实时仿真。连接目标机成功后,启动实时仿真。可执行文件自动运行,与实际关节或HIL 交互;开发工具支持在线调参,启停控制,实时数据存储等功能;
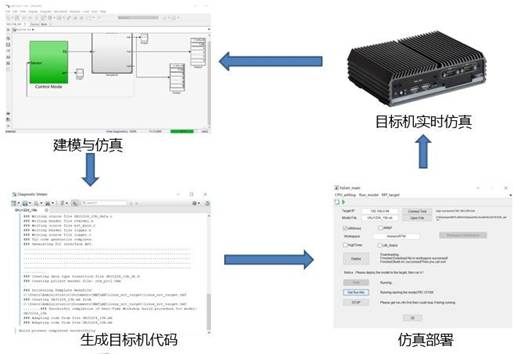
6.仿真数据分析处理;
为各个实验平台提供 Simulink 关节模型库,具体如下:
机器人工具箱:
》关节操作接口库
》编码器采集卡接口库
》3D 显示库
》传感器接口库

所提供的关节平台具备以下特征:
?1)Matlab/Simulink 下建立的动态系统数学模型应用于实时仿真、算法测试, 便于全流程控制和局部算法验证。
?2)高度集成的机器人编译环境保证了模型的可靠性、准确度及更小的仿真步长,提高了模型运算速度和控制精度。
?3)涵盖机器人基础理论和高级控制算法库,集成多种总线通讯模块,建立运动学、动力学模型,兼具视觉、力觉等处理能力。
?4)多层次开发接口:针对开发的深度不同,提供了不同层级的开发,满足不同层次的开发需求。深度开放,满足定制化开发。
?5)算法的离线仿真:支持在不启动操作臂的情况下进行算法的离线仿真验证。支持虚拟机器人显示,保证了控制效果的可观察。
?6)多样化的调试手段:支持控制器模型参数的在线修改、控制变量的在线监控、控制变量数据的实时存储及数据导出等开发调试手段。
?7)系统拓展性强:平台支持机器人开源操作系统ROS,对于不同厂家机器人无论本身是否支持ROS,本平台提供了统一的ROS 驱动。