视觉slam研发平台构建了一整套视觉定位、导航和避障研发平台。视觉slam研发平台紧跟热门学术研究领域与方向,实现了视觉slam与无人机的完美结合,形成了全套的无人机控制平台研发、视觉图像采集、位姿估计、回环检测、三维地图生成,导航避障算法解决方案。视觉slam研发平台能够提供硬件完善、功能齐全、开发环境完整、引领行业发展的研发平台,为各科研团队、高校实验室科研团队的视觉slam和人工智能研究助一臂之力。
视觉slam研发平台软件开发体系如下图所示:
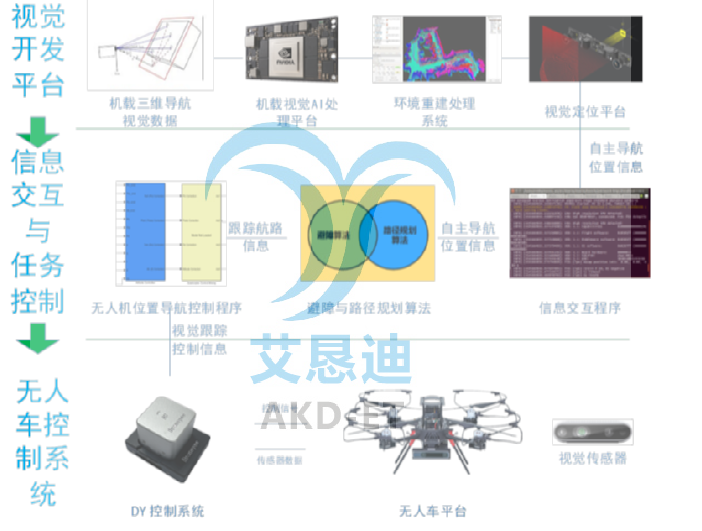
视觉slam研发平台开发体系由视觉开发平台、信息交互与任务控制平台、无人机系统等组成。
视觉slam的位姿估计模块实时获取到双目相机的图像信息和IMU的位姿信息,然后通过视觉惯性融合算法计算出相机的深度信息、位置信息和运动姿态信息,并转换为实时位姿信息,最后通过无人机位姿解算算法将相机的位姿信息转换为无人机的位姿发送给无人机,实现无人机的自主定位。同时,视觉slam算法支持GPU加速技术,大幅提升运算速度与精度。基于词袋技术,构建视觉slam回环检测模块,使视觉slam所计算出来的位姿信息更加准确。由相机发布的三维点云信息获取无人机与障碍物之间的距离,并应用自主导航避障算法生成可执行路径,实现无人机自主导航避障功能。
1、紧扣热点、引领行业发展
紧扣目前无人机研究的热点,提供视觉导航、SLAM、视觉避障、人工智能等领域最新的技术。
2、完善的课程支持,便于教学
该系统提供全套的学科教学课程以及示例算法等,可快速展开相关课程设计,进行实际教学应用阶段。教科书级专业指导,永葆技术先进性。
3、一体化的视觉开发环境
提供全套的机器视觉与视觉导航的开发环境、仿真环境、硬件平台,所提供的硬件均提供完善的二次开发接口和实例代码,省去用户从头搭建开发平台的繁杂工作。
4、提供完整的开发框架和实例
提供完整的无人平台控制、通讯链路、视觉图像采集、图像识别、三维重建、定位解算等软件算法解决方案。提供了VIO、LocalPlanner等多种实例程序,用户只需要简单配置即可实现完整的自主定位、自主建图、自主导航、自主避障等功能。